Mask R-CNN for Object Detection and Segmentation
Mask R-CNN for Object Detection and Segmentation
基于深度神经网络Mask R-CNN,使用TensorFlow实现。
感谢何凯明等人完成的惊人成就,论文传送门:Mask R-CNN
Demo
- balloon分割
- 矿物显微图像的实例分割
- 基于CT扫描的土石混合体图像的精准分割(选择U-Net效果更好)
环境
- tensorflow==1.15.0
- numpy==1.17.4
- scipy
- pillow
- cython
- matplotlib
- scikit-image==0.16.2
- keras==2.1.5
- opencv-python
- h5py==2.10
- imgaug
- pyqt5
- labelme
- PyYAML
- pycocotools
Mask R-CNN 架构分解
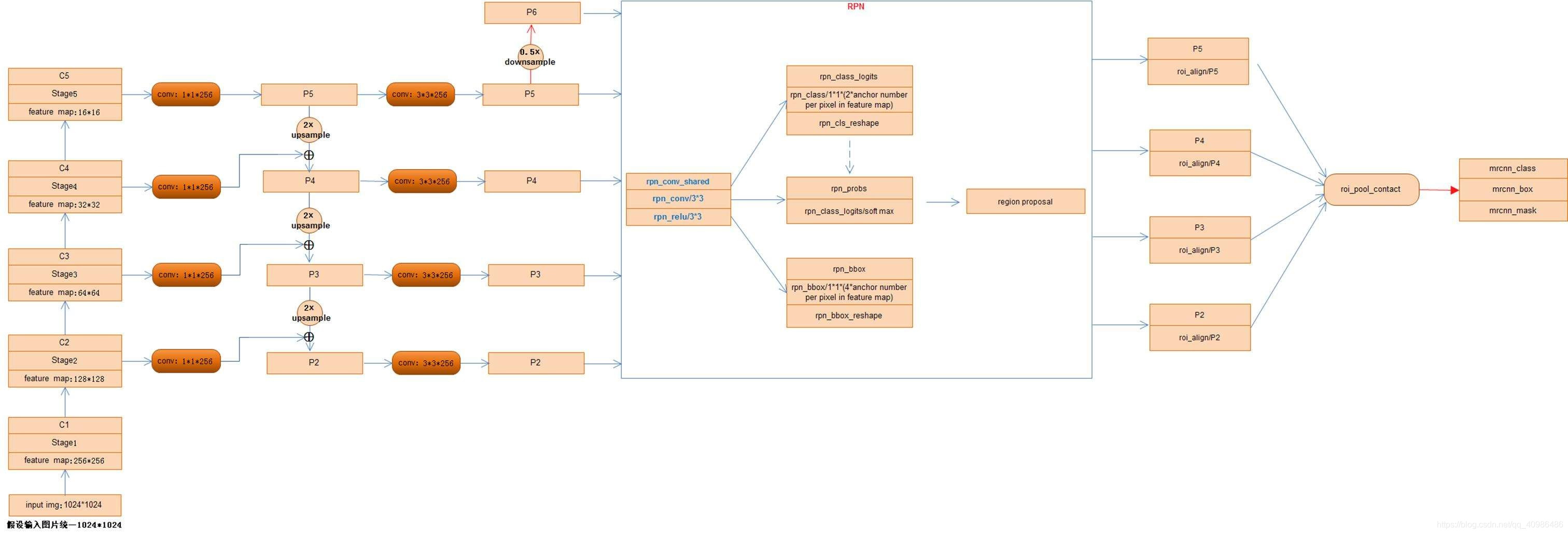
整体网络结构
主干特征提取网络
主干网络是一个残差神经网络( ResNet50 和 ResNet101),作为特征提取器。
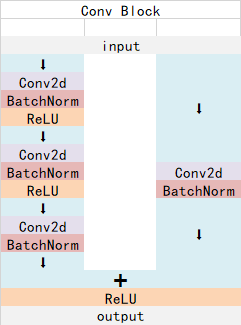
ResNet101有两个基本的块,分别名为Conv Block和Identity Block,其中Conv Block输入和输出的维度是不一样的,所以不能连续串联,它的作用是改变网络的维度;Identity Block输入维度和输出维度相同,可以串联,用于加深网络的。
- Conv Block:
- Identity Block:

特征金字塔FPN
特征金字塔FPN的构建是为了实现特征多尺度的融合,可以在多个尺度上更好地表征目标。在Mask R-CNN当中,我们取出在主干特征提取网络中长宽压缩了两次C2、三次C3、四次C4、五次C5的结果来进行特征金字塔结构的构造。

区域建议网络(RPN)
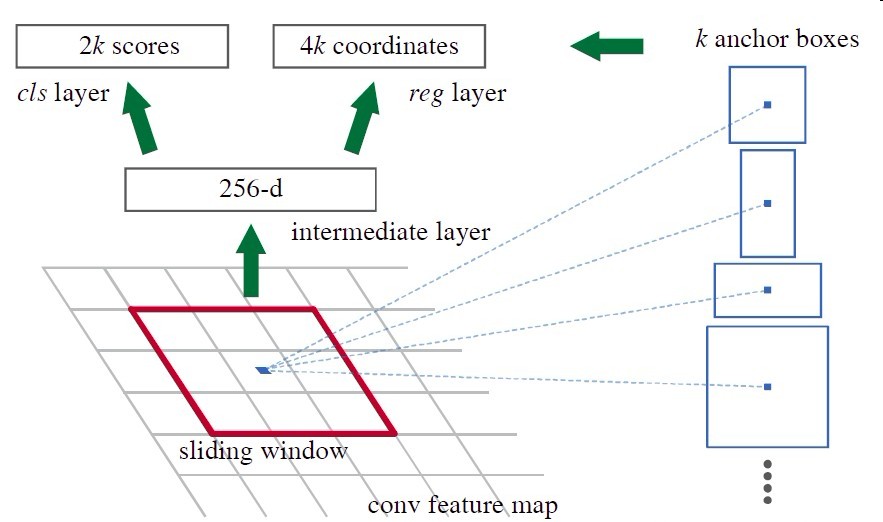
RPN 是一个轻量的神经网络,它用滑动窗口来扫描图像,并寻找存在目标的区域。RPN 扫描的区域被称为 anchor。
RPN用于帮助网络推荐感兴趣的区域,也是Faster-RCNN中重要的一部分。
ROI Align
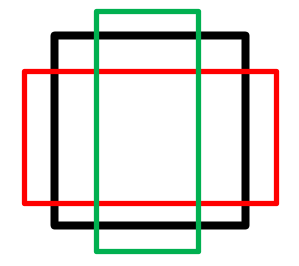
Mask-RCNN中提出了一个新的idea就是RoIAlign,其实RoIAlign就是在RoI pooling上稍微改动过来的,但是为什么在模型中不能使用RoI pooling呢?现在我们来直观的解释一下。
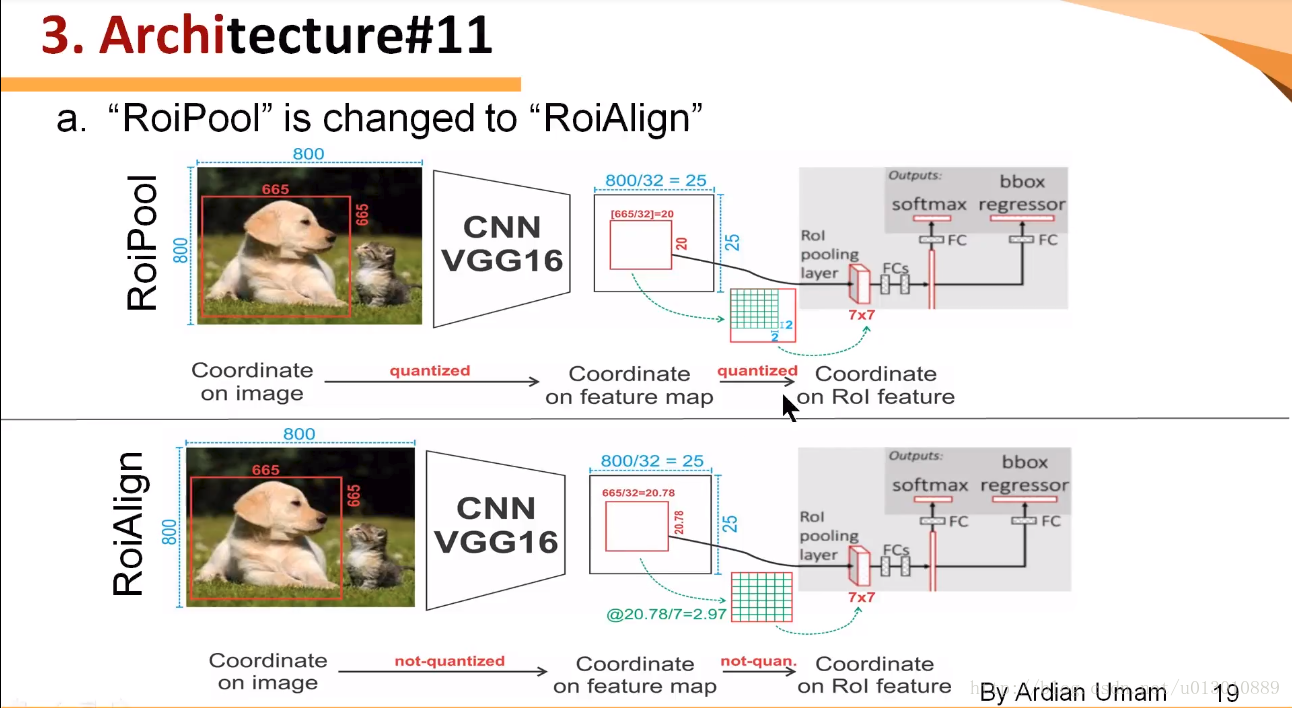
可以看出来在RoI pooling中出现了两次的取整,虽然在feature maps上取整看起来只是小数级别的数,但是当把feature map还原到原图上时就会出现很大的偏差,比如第一次的取整是舍去了0.78,还原到原图时是0.78*32=25,第一次取整就存在了25个像素点的偏差,在第二次的取整后的偏差更加的大。对于分类和物体检测来说可能这不是一个很大的误差,但是对于实例分割而言,这是一个非常大的偏差,因为mask出现没对齐的话在视觉上是很明显的。而RoIAlign的提出就是为了解决这个问题,解决对齐问题。
Classifier
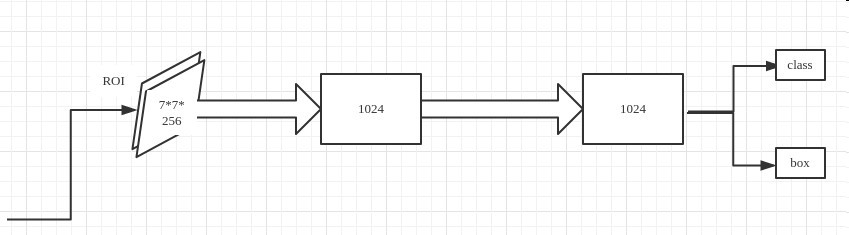
Classifier分类网络就是对每一个ROI进行分类和回归(class + box),即完成图像分类和目标检测
Mask Branch
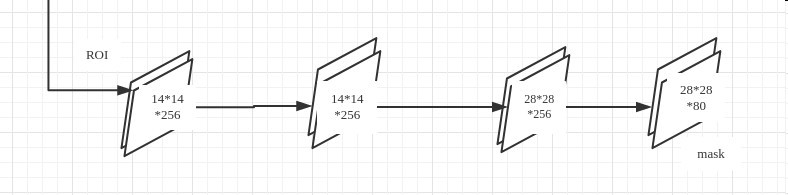
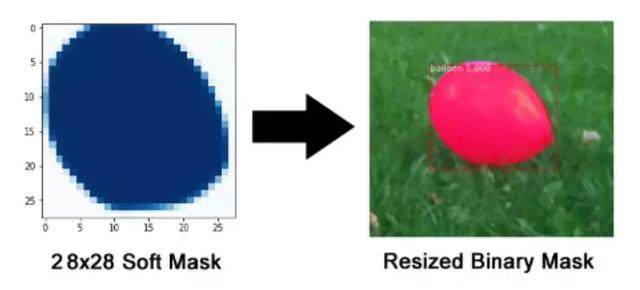
掩码分支是一个卷积网络,取 ROI 分类器选择的正区域为输入,并生成它们的掩码。其生成的掩码是低分辨率的:28x28 像素。但它们是由浮点数表示的软掩码,相对于二进制掩码有更多的细节。掩码的小尺寸属性有助于保持掩码分支网络的轻量性。在训练过程中,我们将真实的掩码缩小为 28x28 来计算损失函数,在推断过程中,我们将预测的掩码放大为 ROI 边框的尺寸以给出最终的掩码结果,每个目标有一个掩码。
注意这个是实现的语义分割而不是实例分割。因为每个ROI只对应一个物体,只需对其进行语义分割就好,相当于了实例分割了,这也是Mask-RCNN与其他分割框架的不同,是先分类再分割。
参考
 wechat
wechat alipay
alipay


